СОДЕРЖАНИЕ
Word, ведомость, спецификация, чертежи, титульный лист.
Введение 10
1. Обоснование и выбор темы дипломного проекта 15
1.1 Факторы, влияющие на управляемость и устойчивость автомобиля 15
1.1.1 Конструктивные и эксплуатационные факторы, влияющие на устойчивость автомобиля 15
1.1.2 Конструктивные и эксплуатационные факторы, влияющие на управляемость автомобиля 21
1.1.3 Влияние на устойчивость и управляемость полноприводной схемы автомобиля 26
1.2 Кинематика поворота автомобиля с разными типами приводов 31
1.3 Постановка цели и задачи дипломного проектирования 37
2. Разработка конструкции полноприводной трансмиссии 39
2.1 Способы повышения управляемости автомобиля 39
2.2 Обзор конструкций систем подключения задних колес 41
2.3 Оценка тягово-скоростных свойств автомобиля 49
2.3.1 Расчет и построение внешней скоростной характеристики двигателя 49
2.3.2 Расчет и построение графиков тягового и мощностного балансов автомобиля 52
2.4 Разработка кинематической схемы подключения задних колес 62
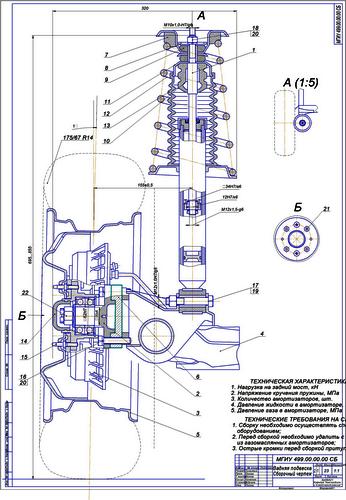
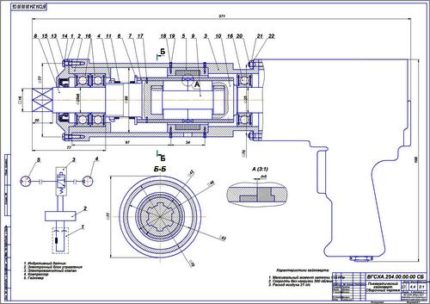
2.5 Расчеты разрабатываемой вискомуфты 63
2.5.1 Силовой расчет вискомуфты 64
2.5.2 Прочностной расчет вискомуфты 68
3 Разработка технологии технического обслуживания муфты подключения задних колес 71
3.1 Перечень операций технического обслуживания муфты подключения 71
3.2 Операционно-технологическая карта технического обслуживания муфты подключения 74
3.3 Разработка технологического оборудования для технического обслуживания муфты подключения 78
3.3.1 Кинематическая схема для технического обслуживания муфты подключения 78
3.3.2 Прочностной расчет наиболее нагруженных деталей стенда для испытания муфты 80
4 Разработка мероприятий БЖД для автопредприятия 84
4.1 Разработка мероприятий БДД для предприятия, эксплуати- рующего легковые автомобили 84
4.2 Разработка мероприятий БЖД для участка технического обслуживания и ремонта трансмиссии 86
4.2.1 Правила техники безопасности при проведении ТО и ремонта автомобиля категории М1 86
4.2.2 Расчет вентиляции участка для ТО и ремонта трансмиссии 88
4.2.3 Техника безопасности при работе со стендом для ТО и ремонта муфт 90
4.2.4 Организационно-технические мероприятия по обеспечению безопасности на производстве 91
5 Технико-экономическая оценка проекта 94
5.1 Технико-экономическая оценка стенда для ремонта муфты 94
5.2 Технико-экономическая оценка конструкторской разработки 100
Заключение 106
Список литературы 108
Приложения 110
Список литературы
1. http://www.miktest.com (14.03.11).
2. http://www.maestria.ru/interesnyie-stati/prohodimost-avtomobilya.html (14.03.11).
3. http://ru.wikipedia.org/wiki/Detroit_Truetrac (04.05.11).
4. Вахламов В.К. Автомобили: Эксплуатационные свойства: учебник для студ. высш. учеб. заведений / 2 – е изд., стер. – М.: Издательский центр «Академия», 2006. – 240 с.
5. http://avto-barmashova.ru/konstrukzi_avto/analiz_komponovochni_shtm/ (05.05.11).
6. http://www.avtonov.svoi.info/parket.htm (05.05.11).
7. Гайсин С.В. Автомобили УАЗ-31519, УАЗ-315195 и их модификации / Руководство по техническому обслуживанию и ремонту. – Ульяновск: ОАО «Ульяновский автомобильный завод», 2005 – 224 с.
8. http://www.4runner.sovintel.ru/differentials.htm (05.05.11).
9. http://systemsauto.ru/transmission/differential.html (05.05.11).
10. http://www.4runner.sovintel.ru/differentials.htm (05.05.11).
11. Вахламов В.К. Автомобили: Конструкция и элементы расчёта. – М.: Издательский центр «Академия», 2006. – 480 с.
12. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей ма-шин .-4-е изд., перераб. и допол.-М: Высшая школа, 1985.-416 с.: ил.
13. Афанасьев Л.Л., Колясинский Б.С., Маслов А.А. Гаражи и станции ТО. Альбом чертежей. М.: Транспорт, 1980. – 216 с.
14. Власов В.М., Жанказиев С.В., и др. Техническое обслуживание и ремонт автомобилей. Учебник для студ. Учреждений сред. Проф. образования. – 2-е изд., стер. – М.: Издательский центр «Академия», 2004. – 480 с.
15. Коноплев В.Н. Техническое обслуживание и ремонт автомобилей. – Ростов на Дону.: Издательский центр «Феникс», 2004.
16. Напольский Г.М. Технологическое проектирование автотранспортных предприятий и станций технического обслуживания: Учебник для вузов.-2-е изд., перераб. и доп.- М.: Транспорт, 1993. – 271 с.
17. Гайсин С.В. Автомобили УАЗ-31519, УАЗ-315195 и их модификации / Руководство по техническому обслуживанию и ремонту. – Ульяновск: ОАО «Ульяновский автомобильный завод», 2005 – 224 с.
18. Напольский Г.М., Солнцев А.А. Технологический расчет и плани-ровка станций технического обслуживания автомобилей, – М., 2003. – 53 с.
19. Луковников А.В., Шкрабак В.С. Охрана труда: Учебники для вузов. – 6-е изд., перераб. и доп. – М.: Агропромиздат, 2007. – 517 с.: ил.
20. Коган Э.И., Хайкин В.А. Охрана труда на предприятиях автомо-бильного транспорта. ? М.: Транспорт, 1984. -327с.: ил.
21. Беклешов. В.К. Технико-экономическое обоснование дипломных проектов: Учебное пособие для вузов. – М.: Высш. шк., 1991. – 176 с.
Введение (выдержка из текста дипломной работы)
Транспорт – одна из отраслей народного хозяйства. Включает в себя различные виды транспорта, такие как автомобильный, железнодорожный, водный, воздушный. Транспорт не производит никакой продукции, но без него невозможно функционирование всех других отраслей народного хозяйства, поэтому материальным продуктом транспортного процесса следует считать вещественное перемещение грузов.
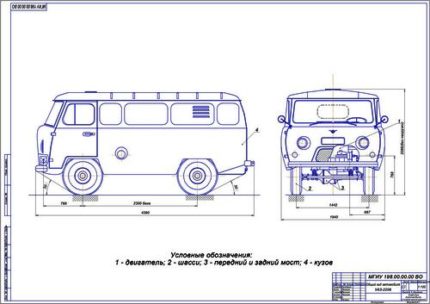
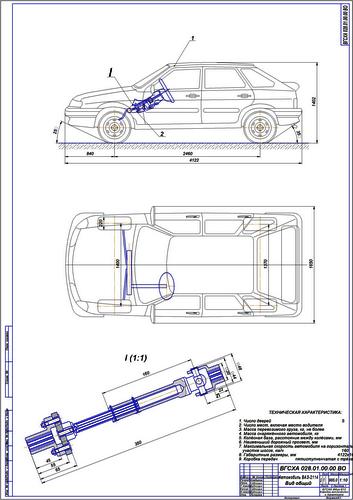
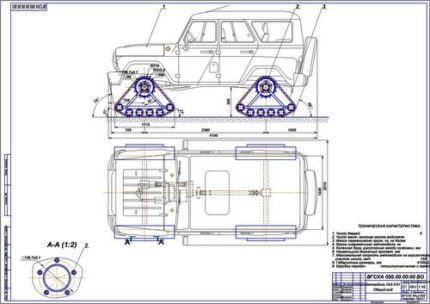
Данный дипломный проект выполнен на тему: «Автомобиль катего-рии М1 с подключаемыми вискомуфтой задними колесами и улучшенными характеристиками управляемости»
Под проходимостью понимается способность автомобиля перевозить с высокой средней скоростью груз, пассажиров или специальное оборудование в тяжелых дорожных или внедорожных условиях. Проходимость автомобиля – комплексное свойство, характеризующее его подвижность и экономичность. Оно неразрывно связано со способностью автомобиля наиболее эффективно выполнять транспортную работу в заданных дорожных условиях [1].
Устойчивость автомобиля является важнейшим эксплуатационным свойством, от которого во многом зависит безопасность движения. Нарушение устойчивости автомобиля приводит к снижению безопасности движения, вследствие чего может возникнуть аварийная ситуация или произойти дорожно-транспортное происшествие. Признаком потери автомобилем устойчивости является его скольжение. В зависимости от направления скольжения автомобиля устойчивость может быть продольной или поперечной. Нарушение у автомобиля поперечной устойчивости в процессе эксплуатации наиболее вероятно и более опасно, чем нарушение продольной устойчивости. Показатели поперечной устойчивости автомобиля по боковому скольжению описаны нами позже.
Управляемость автомобиля – свойство автомобиля изменять направление движения при воздействии водителя на рулевое управление. Хорошая управляемость обеспечивается, если:
– рулевой привод обеспечивает такое соотношение углов поворота управляемых колес, при котором они катятся без бокового скольжения;
– у управляемых колес исключается, произвольные колебания и обеспечивается хорошая стабилизация;
– углы увода переднего и заднего мостов находятся в определенном состоянии;
– водитель имеет возможность определить силы, действующие на управляемые колеса.
Одним из основных способов увеличения управляемости автомобиля является полный привод.
Полный привод (4×4, 4WD, AWD и т. п.) — конструкция трансмиссии автомобиля, когда крутящий момент, создаваемый двигателем, передаётся на все колеса.
До восьмидесятых годов полный привод ассоциировался исключи-тельно с вездеходами, а полноприводные автомобили имели увеличенные дорожный просвет и другие атрибуты повышенной проходимости.
Однако после появления системы quattro на чисто дорожных автомобилях Audi и ряда аналогичных систем у других компаний, привод на все колёса стал рассматриваться и как средство повышения ходовых качеств обычных автомобилей без задачи повышения проходимости. В этом случае обеспечивается наиболее эффективное использование мощности двигателя при любом режиме движения, улучшается управляемость, особенно на скользких покрытиях.
Именно с этими целями полный привод используется на спортивных автомобилях, например, Lamborghini Murcielago и некоторых моделях Porsche, широко распространен на автомобилях Subaru, а также на представительских автомобилях для повышения уровня активной безопасности — примеры такого использования включают системы 4Matic (на автомобилях Mercedes Benz), XWD (Saab), xDrive (BMW), а из отечественных разработок — трансмиссию малосерийной представительской «Волги» ГАЗ-3105.
Можно выделить три основных схемы полного привода: подключаемый полный привод (part-time), постоянный полный привод (full-time) и постоянный по требованию полный привод (on-demand full-time).
Подключаемый полный привод
Самая простая и в то же время самая надежная схема полного привода: при нормальной эксплуатации момент передаётся только на одну ось, а при необходимости подключается вторая ось — с помощью раздаточной коробки. При подключении оси жестко связываются между собой и вращаются с одинаковой скоростью, что создаёт некоторые ограничения: полный привод можно использовать только на покрытиях, допускающих проскальзывание колес (грязь, песок, снег, лед и т. п.).
При жесткой связи ведущих мостов в трансмиссии может возникнуть циркуляция мощности. При движении по хорошей горизонтальной дороге циркулирующая мощность (ЦМ) может быть значительной. ЦМ не используется для преодоления сил сопротивления движению автомобиля, дополнительно нагружает механизмы трансмиссии и шины, вызывая их повышенное изнашивание. Кроме того, из-за увеличения суммарной мощности, передаваемой через механизмы трансмиссии, возрастают потери мощности в трансмиссии на буксовании колес, увеличивая расход топлива и изнашивание деталей двигателя. Поэтому ЦМ является вредной, и ее часто называют паразитной мощностью. Чтобы уменьшить дополнительное изнашивание механизмов трансмиссии, шин и расход топлива, вызванных ЦМ и перераспре-делением крутящего момента, при раздаточной коробке с блокированным приводом необходимо включать передний ведущий мост только для повы-шения проходимости и устойчивости автомобиля. При движении по хоро-шим дорогам необходимо принудительное отключение переднего ведущего моста для устранения циркуляции мощности или перераспределения крутящего момента.
Таким образом, основной недостаток подключаемого полного привода проявляется при перемещении по поверхности с часто меняющимися свойствами — асфальт с пятнами льда или снега, твердый грунт с участками грязи и т.д. Необходимо либо постоянно подключать и затем выключать передний мост (что иногда сопряжено с определенными сложностями в зависимости от реализации способа подключения моста), либо перемещаться на заднем мосту, рискуя застрять, либо перемещаться на полном приводе, изнашивая трансмиссию циркуляциями мощности на хороших участках дороги.
Постоянный полный привод подразумевает постоянное подключение всех колёс к двигателю, для чего он подключается к осям через дифференциал. Некоторые модели автомобилей имеют принудительную блокировку межосевого дифференциала, что позволяет им становиться аналогичными автомобилям с подключаемым полным приводом (в общем это повышает проходимость автомобиля). Некоторые современные автомобили имеют электронное управление межосевым дифференциалом, позволяющее динамически менять соотношение передаваемого момента между осями. В основном это используется для уверенного движения по дорогам, например, в системах динамической стабилизации. Тем не менее, в некоторых ситуациях это может внести неоднозначность в реакциях автомобиля на педаль газа.
Некоторые внедорожники имеют раздаточную коробку, поддержи-вающую как режим постоянного полного привода, так и режим подключаемого полного привода, то есть имеют дифференциал, блокировку дифференциала и возможность полного отключения одной оси. Такая схема считается наиболее предпочтительной для многоцелевого внедорожника.
Полный привод по требованию (англ. TOD — torque on demand)
Эта схема классифицируется продавцами автомобилей как разновидность постоянного полного привода. Преимуществ «настоящего» постоянного полного привода не даёт. Фактически, это подключаемый полный привод с тем отличием, что подключение происходит автоматически. В этой схеме одна ось подключена жестко, а вторая (передняя или задняя, чаще — задняя) подключается при проскальзывании первой через разнообразные муфты (вискомуфта (Гольф-3), Халдекс (Гольф-4), многодисковая гидромуфта (Subaru с АКПП серий TZ)…). Управление муфтой осуществляется электроникой или механико-гидравлическим образом, за исключением вискомуфты. Недостатком такой схемы можно считать необходимость улавливания момента включения полного привода для корректировки управления автомобилем. В некоторых случаях это приводит к неоднозначности реакций на до-бавление тяги (открытие газа) и усложняет контроль над автомобилем на бездорожье.